《数据结构与算法》
数据结构
数组
前缀和数组
适用于快速、频繁地计算一个索引区间内的元素之和。
差分数组
适用场景是频繁对原始数组的某个区间的元素进行增减。
哈希表
矩阵
链表
反转
判定环
栈与队列
- 优先队列:堆的应用之一
树
遍历
前、中、后序
递归遍历,非递归遍历
深度遍历(DFS),广度遍历(BFS)
二叉树
二叉查找树
也叫二叉搜索树,英文 BST (Binary Sort Tree),要了解一下他们的查找,插入,删除
二叉查找树不保证平衡
自平衡二叉查找树:
AVL树
AVL树是高度平衡的二叉树。它的特点是: AVL树中任何节点的两个子树的高度最大差别为1。
红黑树
红黑树的性质: 红黑树是一棵二叉搜索树,它在每个节点增加了一个存储位记录节点的颜色,可以是RED,也可以是BLACK;通过任意一条从根到叶子简单路径上颜色的约束,红黑树保证最长路径不超过最短路径的二倍,因而近似平衡。具体性质如下:
- 每个节点颜色不是黑色,就是红色
- 根节点是黑色的
- 如果一个节点是红色,那么它的两个子节点就是黑色的(没有连续的红节点)
- 对于每个节点,从该节点到其后代叶节点的简单路径上,均包含相同数目的黑色节点
Treap
Treap=Tree+Heap,树堆=树+堆
Treap既是一棵二叉查找树,也是一个二叉堆。但是这两种数据结构貌似还是矛盾的存在,如果是二叉查找树,就不能是一个堆,如果是一个堆,那么必然不是二叉查找树。
所以树堆用了一个很巧妙的方式解决这个问题:给每个键值一个随机附加的优先级,让键值满足二叉查找树的结构,让优先级满足二叉堆的结构。
就像下面这个样子:(图片摘自腾讯云)
完全二叉树
每一层都是紧凑靠左排列的

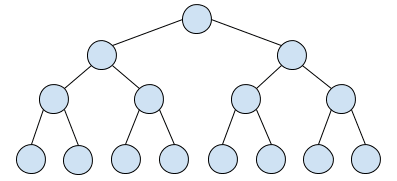
满二叉树
是一种特殊的完全二叉树,每层都是是满的,像一个稳定的三角形
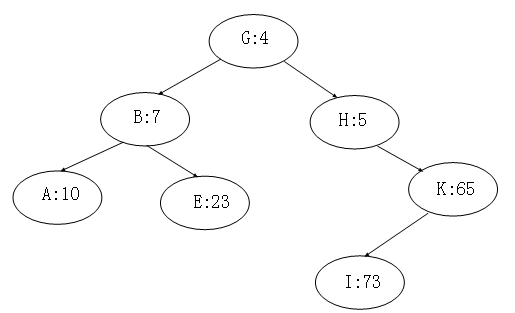
哈夫曼树
Huffman Tree
带权路径长度最短的二叉树,也称为最优二叉树
哈夫曼编码
多路搜索树
B树,B-树
B-tree树 即 B树,是一种多路搜索树
B 树的两个明显特点:
树内的每个节点都存储数据
叶子节点之间无指针相邻
B+树
B+树的两个明显特点
- 数据只出现在叶子节点
- 所有叶子节点增加了一个链指针
B+树相比 B 树的优势
单一节点存储更多的元素,使得查询的 IO 次数更少;
所有查询都要查找到叶子节点,查询性能稳定;
所有叶子节点形成有序链表,便于范围查询。
B*树
是 B+树的变体,在 B+树的非根和非叶子结点再增加指向兄弟的指针
2-3树 与 2-3-4树
2-3树中每一个节点都具有两个孩子(我们称它为2节点)或三个孩子(我们称它为3节点)。
字典树
Trie,又称字典树、单词查找树,是一种哈希树的变种。典型应用是用于统计,排序和保存大量的字符串(但不仅限于字符串),所以经常被搜索引擎系统用于文本词频统计。它的优点是:利用字符串的公共前缀来减少查询时间,最大限度地减少无谓的字符串比较,查询效率比哈希树高。
堆
本质:一个可以被看做一棵完全二叉树的数组
实现:建堆过程,堆的调整
单推问题:
通过一个堆就可以解决的问题
一般这种问题都具有以下特点:求解第/前 k个最大,最小或是最频繁的元素;都可以使用堆来实现 (而不用通过排序实现)
双堆问题:
通过两个堆相互配合解决问题
特点:
被告知,我们拿到一大把可以分成两队的数字。怎么把数字分成两半?使得:小的数字都放在一起,大的放在另外一半。双堆模式就能高效解决此类问题。然后通过小顶堆寻找最小数据,大顶堆寻找堆中最大数据
图
拓扑排序
二分图
并查集
最小生成树
Kruskal:利用 Union-Find 并查集算法向最小生成树中添加边,配合排序的贪心思路,从而得到一棵权重之和最小的生成树。
Prim:切分定理。
比较:Kruskal 算法是在一开始的时候就把所有的边排序,然后从权重最小的边开始挑选属于最小生成树的边,组建最小生成树。Prim 算法是从一个起点的切分(一组横切边)开始执行类似 BFS 算法的逻辑,借助切分定理和优先级队列动态排序的特性,从这个起点「生长」出一棵最小生成树。
最短路径算法
Dijkstra 算法
Bellman-Ford 算法(可处理负权边)
Floyd 算法
SPFA 算法
其他
跳跃表
布隆过滤器,位图,hyperloglog
倒排索引
LRU与LFU
算法
时间/空间复杂度
算法复杂度
多项式时间
一种是 O(1),O(log(n)),O(n^a) 等,我们把它叫做多项式级的复杂度,因为它的规模 n 出现在底数的位置;另一种是 O(a^n) 和 O(n!) 型复杂度,它是非多项式级的。后者的复杂度无论如何都远远大于前者,其复杂度计算机往往不能承受。原文
这里引出几个问题:
NP 问题:就是可以(多知项式时间内)短时间内验证一个答案正确性的问题。
NP 完全问题:第一个条件,可以这么说,就是道你如果能解决 A 问题,则通过 A 问题可以解决 B 问题,那么回 A 问题比 B 问题复杂,当所有的问题都可以通过 A 问题的解决而解决的话,那么 A 问题就可以称为 NP 完全问题,第二个条件,就是答 A 问题属于 NP 问题。
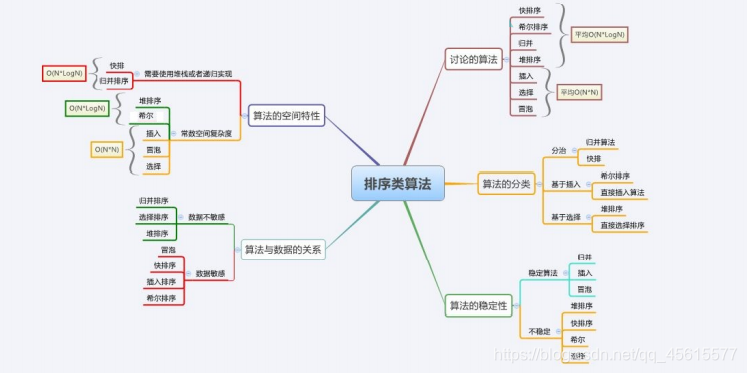
排序
插入排序
插入排序的三种实现:直接插入排序,二分查找插入排序,希尔排序。
(1)直接插入排序
时间复杂度:O(n^2)
直接插入排序耗时的操作有:比较+后移赋值。时间复杂度如下:
1) 最好情况:序列是升序排列,在这种情况下,需要进行的比较操作需(n-1)次。后移赋值操作为0次。即O(n)
2) 最坏情况:序列是降序排列,那么此时需要进行的比较共有n(n-1)/2次。后移赋值操作是比较操作的次数加上 (n-1)次。即O(n^2)
空间复杂度:O(1)
稳定性:直接插入排序是稳定的,不会改变相同元素的相对顺序。
优化改进
1) 二分查找插入排序:因为在一个有序区中查找一个插入位置,所以可使用二分查找,减少元素比较次数提高效率。
2) 希尔排序:如果序列本来就是升序或部分元素升序,那么比较+后移赋值操作次数就会减少。希尔排序正是通过分组的办法让部分元素升序再进行整个序列排序。(原因是,当增量值很大时数据项每一趟排序需要的个数很少,但数据项的距离很长。当增量值减小时每一趟需要和动的数据增多,此时已经接近于它们排序后的最终位置。)
(2)二分查找插入
直接插入排序的一个变种,区别是:在有序区中查找新元素插入位置时,为了减少元素比较次数提高效率,采用二分查找算法进行插入位置的确定。
时间复杂度 O(n^2),稳定的
(3)希尔排序
思想:分治策略
希尔排序是一种分组直接插入排序方法,其原理是:先将整个序列分割成若干小的子序列,再分别对子序列进行直接插入排序,使得原来序列成为基本有序。这样通过对较小的序列进行插入排序,然后对基本有序的数列进行插入排序,能够提高插入排序算法的效率。
希尔排序的时间复杂度与增量的选取有关,但是现今仍然没有人能找出希尔排序的精确下界。
平均时间复杂度 O(nlog2n),不稳定。
选择排序
(1)简单选择排序
每一次从待排序的数据元素中选出最小(或最大)的一个元素,存放在序列的起始位置,直到全部待排序的 数据元素排完 。
找出序列中的最小关键字,然后将这个元素与序列首端元素交换位置。
(2)堆排序
如何建堆 和调整堆?
堆排序 | 数据结构与算法 系列教程(笔记) (zq99299.github.io)
排序 - 堆排序(Heap Sort) | Java 全栈知识体系 (pdai.tech)
交换排序
(1)冒泡
比较两个记录键值的大小,如果这两个记录键值的大小出现逆序,则交换这两个记录
缺点:慢,每次只能移动两个相邻的数据
(2)快排
选择基准的方式:固定位置、随机选取基准、三数取中(三种快排)
快排最好最坏的情况?优化方案?
优化方式:
优化1:当待排序序列的长度分割到一定大小后,使用插入排序
优化2:在一次分割结束后,可以把与Key相等的元素聚在一起,继续下次分割时,不用再对与key相等元素分割
优化3:优化递归操作
优化4:使用并行或多线程处理子序列(略)
(了解三路快排、双基准)
快排是二路划分的算法。如果待排序列中重复元素过多,也会大大影响排序的性能。这时候,如果采用三路划分,则会很好的避免这个问题。
扩展:
这里给出了双路快排,三路快排,自底向上的归并排序算法等解析
附:关于他双路快排的实现:
while ((i < right) && (arr[i] < v)) i++; // 使用索引 i 从左往右遍历直到 arr[i] < v
while ((j > left + 1) && (arr[j] > v)) j--; // 使用索引 j 从右往左遍历直到 arr[j] > v
个人认为还可以优化,把相等的情况考虑进去,如下:
while ((i < right) && (arr[i] <= v)) i++; // 使用索引 i 从左往右遍历直到 arr[i] < v
while ((j > left + 1) && (arr[j] >= v)) j--; // 使用索引 j 从右往左遍历直到 arr[j] > v
归并排序
为什么快速排序是不稳定排序,而归并排序是稳定排序呢?
非比较排序算法
前述几种排序算法都属于“基于比较的排序算法”,它们通过比较元素间的大小来实现排序。此类排序算法的时间复杂度无法超越O(nlogn)。
还有几种“非比较排序算法”,它们的时间复杂度可以达到线性阶:
桶排序,计数排序,基数排序
排序算法比较
时间、空间、稳定性比较
选择排序和冒泡排序的区别
选择排序每次从未排序的部分选取最小(或最大)的元素,然后与未排序部分的第一个元素交换位置,这样逐步形成有序序列。
冒泡排序则是依次比较相邻的元素,如果顺序不对就交换它们的位置,这样逐步将最大(或最小)的元素“冒泡”到末尾。
总体而言,选择排序在每一轮中找到最小元素只进行一次交换,而冒泡排序可能需要多次交换。因此,选择排序通常在实际应用中略优于冒泡排序。
稳定性:
插入、冒泡、归并、基数 排序算法是稳定的。
Java 中是排序算法
Colletions.sort和Arrays.sort分别用了什么排序算法呢
查找
二分搜索
选取mid时,(r + l) / 2 这里的加法可能回产生整型溢出,
解决办法:l + (r - l) / 2
三分搜索
已知函数 𝑓(𝑥) 在区间 [l,r] 上单峰且连续,求 𝑓(𝑥) 在 [l,r] 上的极值。
每次迭代将当前区间的长度缩小 1/3 。
索引,倒排索引
双指针
KPM 算法
-
补充:这篇博客的数组并不是 next 数组,而是"部分匹配值"数组,就是"前缀"和"后缀"的最长的共有元素的长度
-
该博客分析了
k = next[k]的问题 KMP 算法及优化 - 疯狂的爱因斯坦 - SegmentFault
该博客讲解了 KPM 的优化问题
-
五大常用算法
贪婪(贪心)算法,动态规划算法,分治算法,回溯算法以及分支限界算法
贪心
基本思想:在对问题求解时,总是做出在当前看来是最好的选择(不从整体最优上考虑,只做出在某种意义上的局部最优解)。
它省去了为找最优解要穷尽所有可能而必须耗费的大量时间,它采用自顶向下,以迭代的方法做出相继的贪心选择,每做一次贪心选择就将所求问题简化为一个规模更小的子问题,通过每一步贪心选择,可得到问题的一个最优解,虽然每一步上都要保证能获得局部最优解,但由此产生的全局解有时不一定是最优的,所以贪心算法不要回溯。
动态规划
基本思想:将待求解的问题分解成若干子问题,先求解子问题,然后从这些子问题中得到原问题的解。用分治法不同的是,适用于动态规划法求解的问题,经分解得到子问题往往不是互相独立的(即下一个子阶段的求解是建立在上一个子阶段的解的基础上,进行进一步的求解)。
特征:
(1)最优子结构:最优子结构性质是指问题的最优解包含其子问题的最优解。
(2)子问题重叠:子问题重叠是指在求解子问题的过程中,有大量的子问题是重复的。
(3)无后效性:当前阶段的求解只和前面阶段有关,和后续阶段无关,称为“无后效性”。
三要素:
状态转移方程、最优子结构、最优子结构
常见问题:
最长递增子序列
解法 1:最长公共子序列法
解法 2:动态规划法(时间复杂度 O(N^2))
dp[i] 表示以标识为 i 的元素为递增序列结尾元素的最长递增子序列的长度
解法 3:O(NlgN)算法
b[i] 只是存储的对应长度为 i 的 LIS 的最小末尾
最长公共子序列
用 dp[i][j] 来表示 A 串中的前 i 个字符与 B 串中的前 j 个字符的最长公共子序列长度
最长公共子串
这个问题与上面的问题类似,区别点在于这里是子串,是连续的,令 dp[i][j] 表示 A 串中的以第 i - 1 个字符与 B 串中的以第 j - 1 个字符结尾的最长公共子串的长度
最小编辑代价问题
首先令 dp[i][j] 表示将 A 串中的前 i 个字符转换成 B 串中的前 j 个字符所需要的代价
0-1背包问题
分治
基本思想:与动态规划法类似,将待求解的问题分解成若干子问题,求出子问题的解,合并之后即为原问题的解。不同的是:这些子问题是相互独立的,且与原问题的性质相同。(可用分治法解决的问题常常采用递归的形式求解)。
解题步骤:
(1)分解:将要解决的问题分解为若干个规模较小、相互独立、与原问题形式相同的子问题。
(2)治理:求解各个子问题,由于各个子问题与原问题形式相同,只是规模较小而已,而当子问题规划的足够小时,就可以用较简单的方法解决。
(3)合并:按照原问题的要求,将子问题的解合并为原问题的解。
常见问题:
二分搜索
归并派系
快速排序
回溯
基本思想:回溯法是一种选优搜索法,按选优条件向前搜索,以达到目标。当搜索到某一步时发现不满足条件,即进行回溯(退回上一步重新进行选择),直到搜索完整个空间。
简单易懂的回溯算法(Back Tracking) - cometwo的个人空间 - OSCHINA - 中文开源技术交流社区
深度优先搜索算法
八皇后问题
分支限界法
基本思想:求解目标为找出满足约束条件的一个解,或是在满足约束条件的解中找出在某种意义下的最优解,常使用广度优先搜索算法。
常用的两种分支限界法:
(1)队列式分支限界法
(2)优先队列式分支限界法
FIFO搜索,LIFO搜索
思想
递归
斐波那契数列,其时间复杂度和空间复杂度
递推
动态规划就是递推的思想
算法洗脑系列(8 篇)——第一篇 递推思想 - 一线码农 - 博客园
启发式算法
遗传算法(GA)
A* 算法(可拓展了解下 Navmesh)
算法题
经典题目
经典问题之字符串
Top K 问题
-
青蛙跳阶问题:递归时的重复计算问题
递增子序列:看一下解题思路:穷举分析,确定边界,找规律,确定状态转移方程
有意思的题目
摩尔投票法
GCD,它通常表示最大公约数(greatest common divisor)
欧几里德算法又称辗转相除法,是指用于计算两个正整数a,b的最大公约数。应用领域有数学和计算机两个方面。计算公式gcd(a,b) = gcd(b,a mod b)。
海量数据处理
链接
参考链接
labuladong 的算法笔记 | labuladong 的算法笔记
练习平台
书单
- 《漫画算法:小灰的算法之旅》
- 《 算法导论 》
- 《 算法 ( 第4版 ) 》